


行业背景
多节点多工种的一体化结合,节省人力成本和优化流程提高产能效率一直是行业追求的目标。随着5G和工业4.0的发展,自主的集成化智能产线也越来越多的得到了关注。
.jpg)
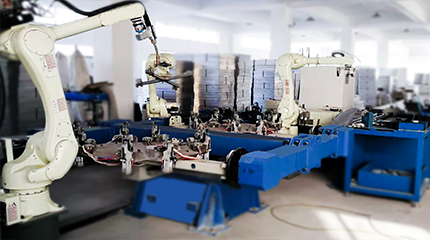
传统的焊接工艺后,需要对焊缝的焊渣进行打磨,才能确保焊接的品质。耗时又费力的焊接打磨作业工艺,严重影响到企业的正常生产。
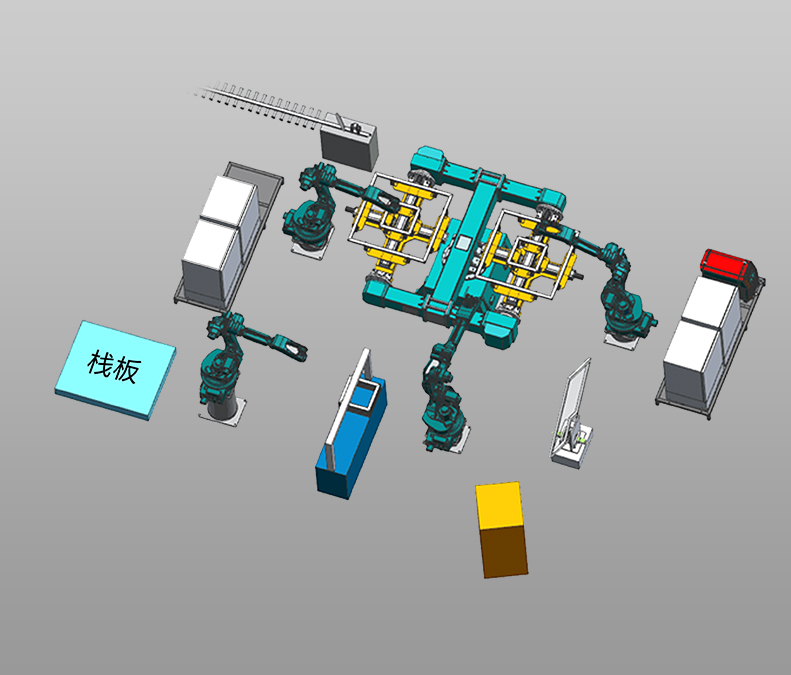
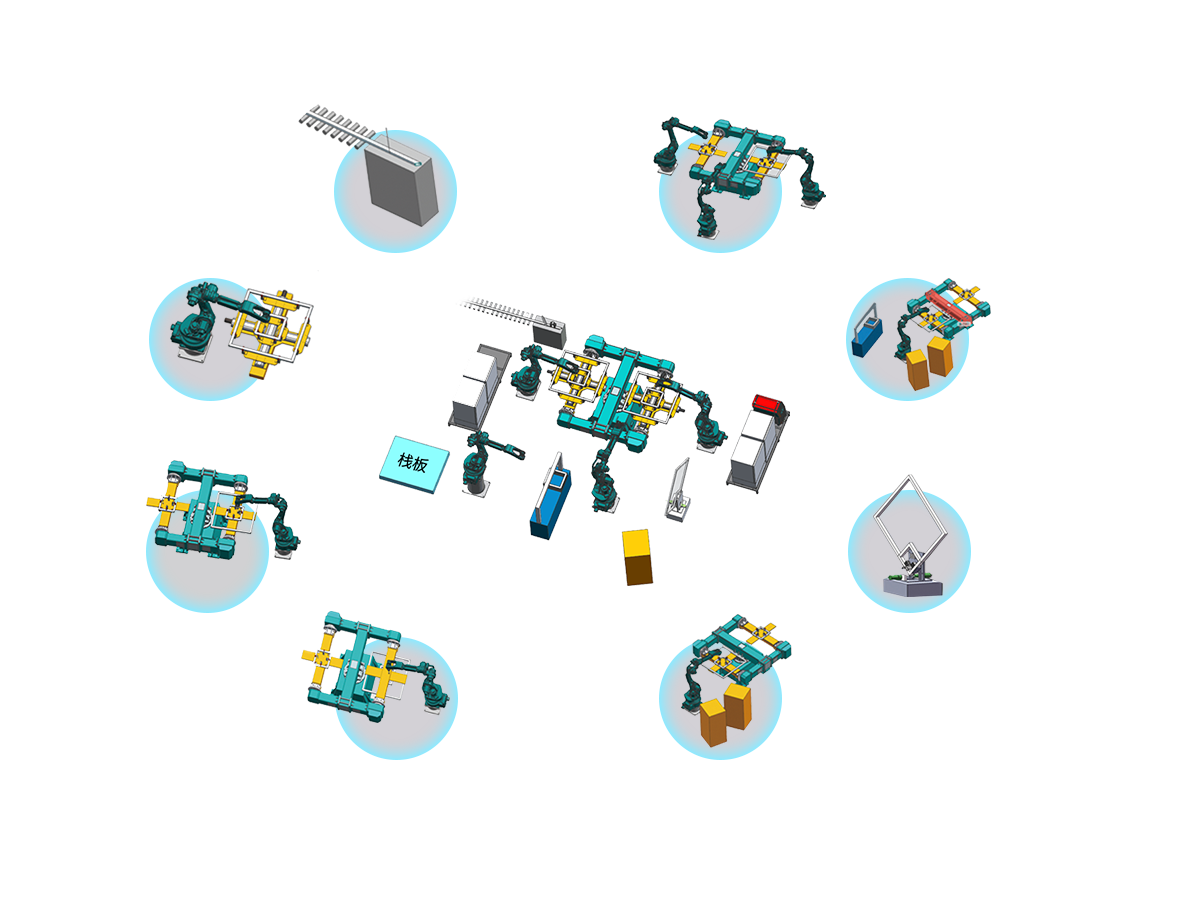
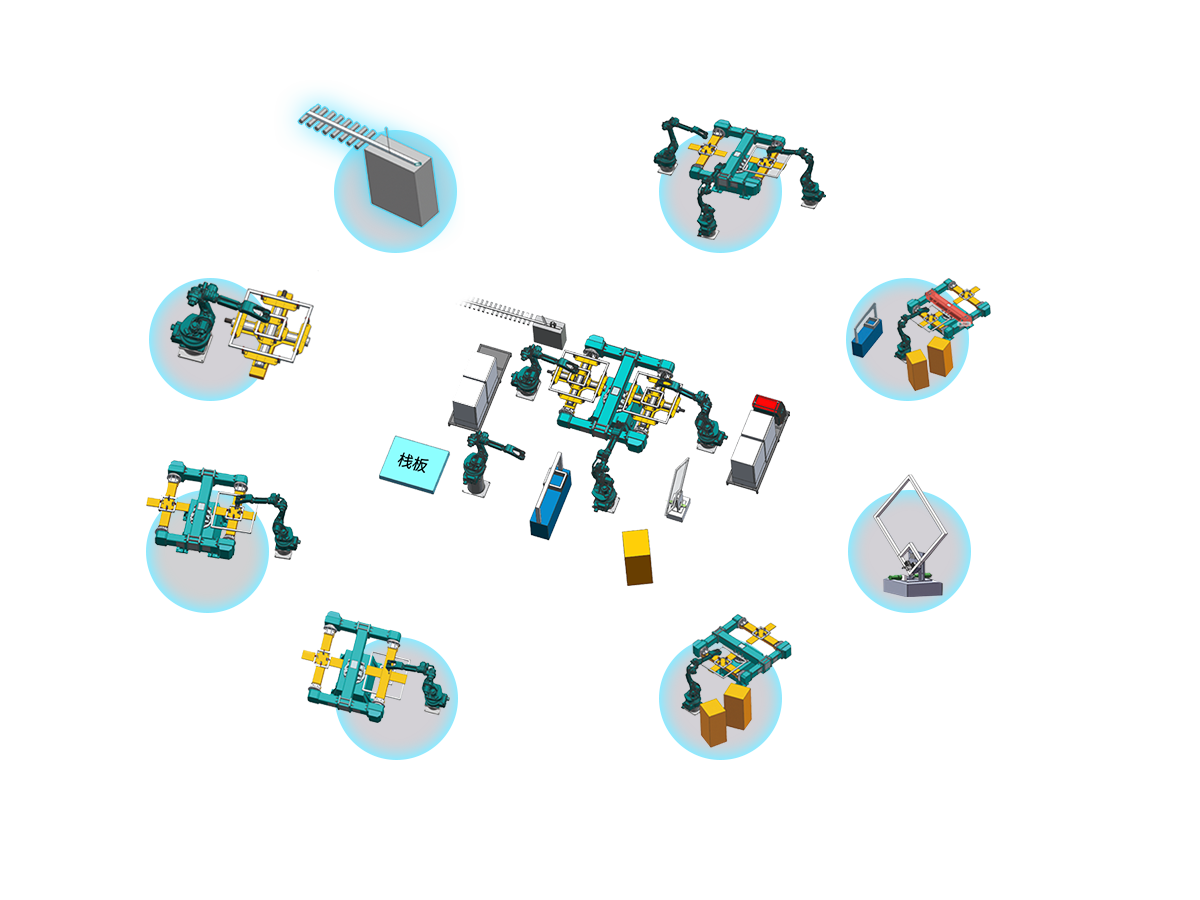
焊接打磨自动产线整站组成
-
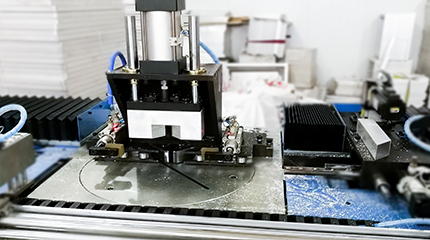
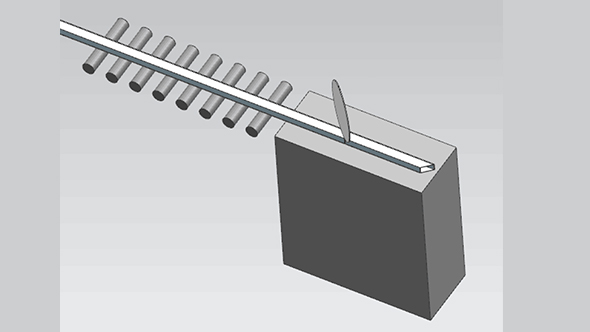 尺寸二次定位尺寸二次定位尺寸二次定位6米铝型材 自动送料切割 纯伺服控制 自带去灰渣系统
尺寸二次定位尺寸二次定位尺寸二次定位6米铝型材 自动送料切割 纯伺服控制 自带去灰渣系统 -
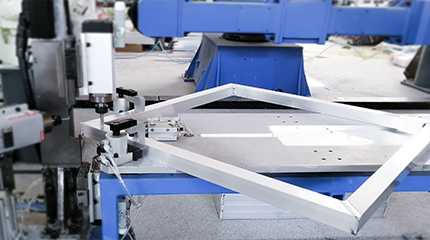
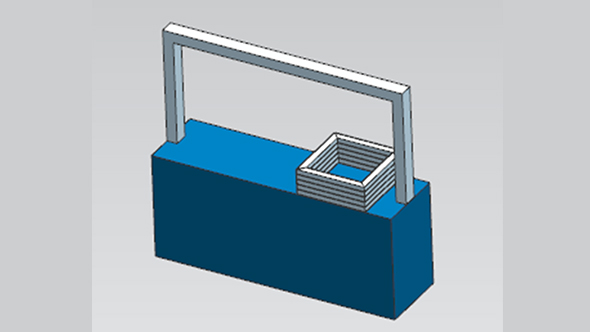 尺寸二次定位打磨机器人将打磨完成的工件放至打包机上,待堆垛完成5(根据需求设定)个工件,打包机执行打包动作,将5个工件打包。
尺寸二次定位打磨机器人将打磨完成的工件放至打包机上,待堆垛完成5(根据需求设定)个工件,打包机执行打包动作,将5个工件打包。 -
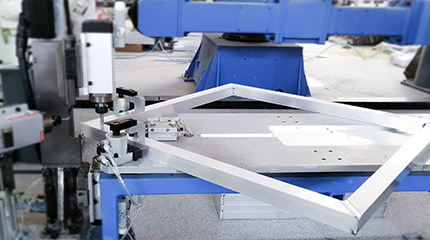
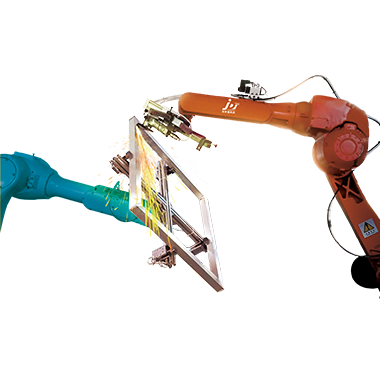
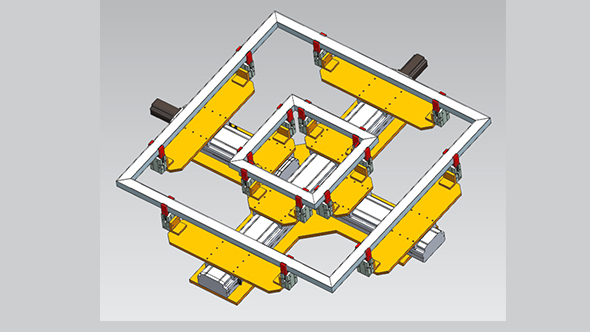 尺寸二次定位每个料由2个夹头夹紧,X1X2Y轴模组可实现快速转换工件尺寸定位,由于工件最大以及最小尺寸差距较大,工装无法一部到位,工装模组需做2-3套,每套可共用一定范围尺寸内的工件,工装可通过拆卸4颗螺栓,便捷替换,具体工装依照所有工件大小尺寸而定!
尺寸二次定位每个料由2个夹头夹紧,X1X2Y轴模组可实现快速转换工件尺寸定位,由于工件最大以及最小尺寸差距较大,工装无法一部到位,工装模组需做2-3套,每套可共用一定范围尺寸内的工件,工装可通过拆卸4颗螺栓,便捷替换,具体工装依照所有工件大小尺寸而定! -
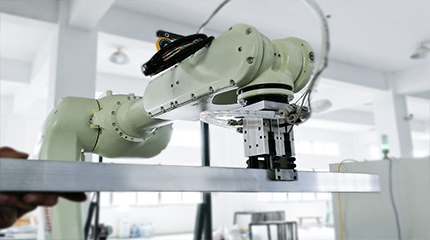
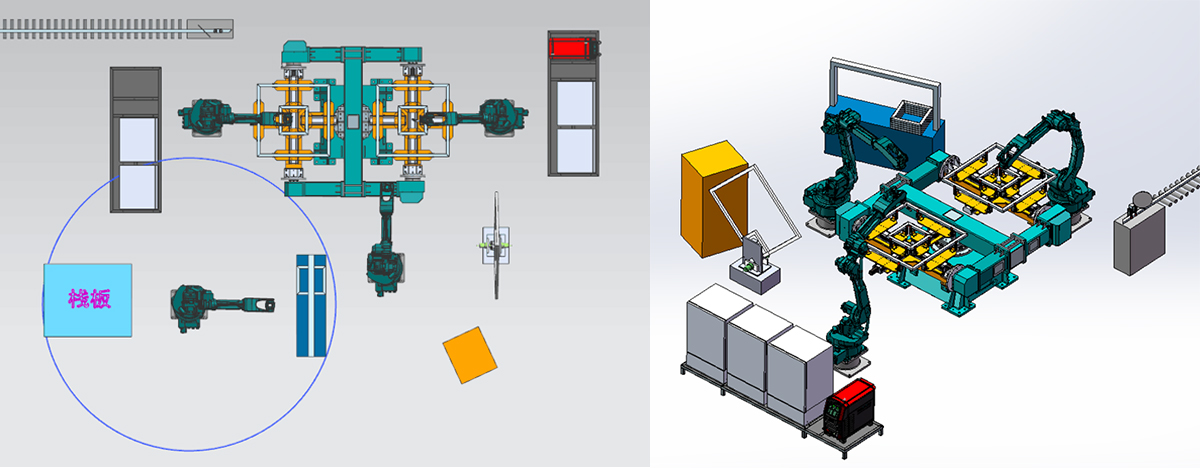
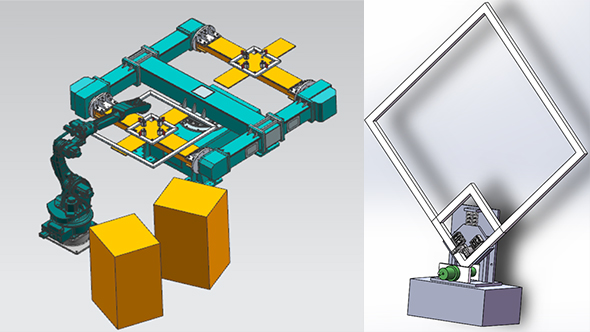 尺寸二次定位尺寸二次定位焊接完成,变位机变位90度,打磨机器人抓取工件,变位机继续变位90度,上料机器人可继续上料,同时焊接机器人可继续焊接,打磨机器人抓着工件先到高速切削机进行粗切削,且砂光工件表面,然后移至斜边砂带机进行打磨,打磨完成后,将工件放置打包机上等待5个工件堆垛完成一起打包。
尺寸二次定位尺寸二次定位焊接完成,变位机变位90度,打磨机器人抓取工件,变位机继续变位90度,上料机器人可继续上料,同时焊接机器人可继续焊接,打磨机器人抓着工件先到高速切削机进行粗切削,且砂光工件表面,然后移至斜边砂带机进行打磨,打磨完成后,将工件放置打包机上等待5个工件堆垛完成一起打包。
SHANGHAI JDT TECHNOLOGY CO,LTD. © 2019
A SUNSHINE GROUP COMPANY
A SUNSHINE GROUP COMPANY
